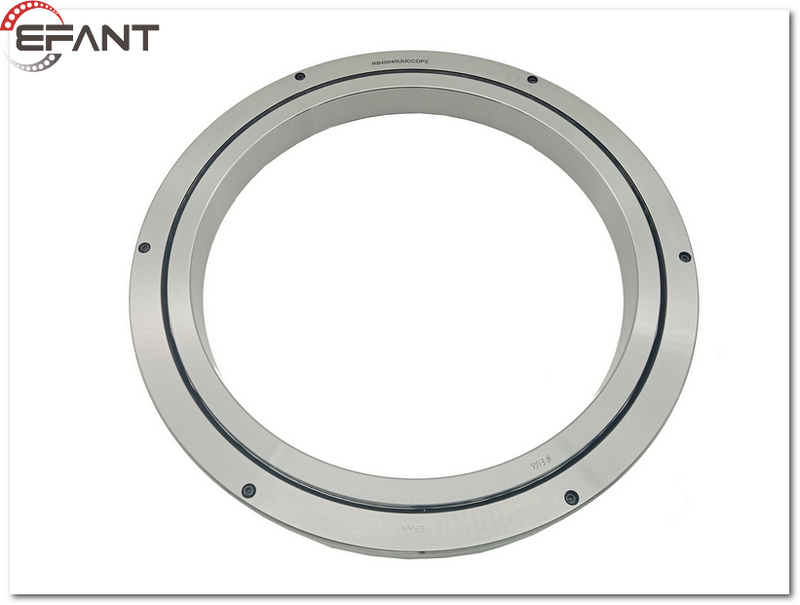
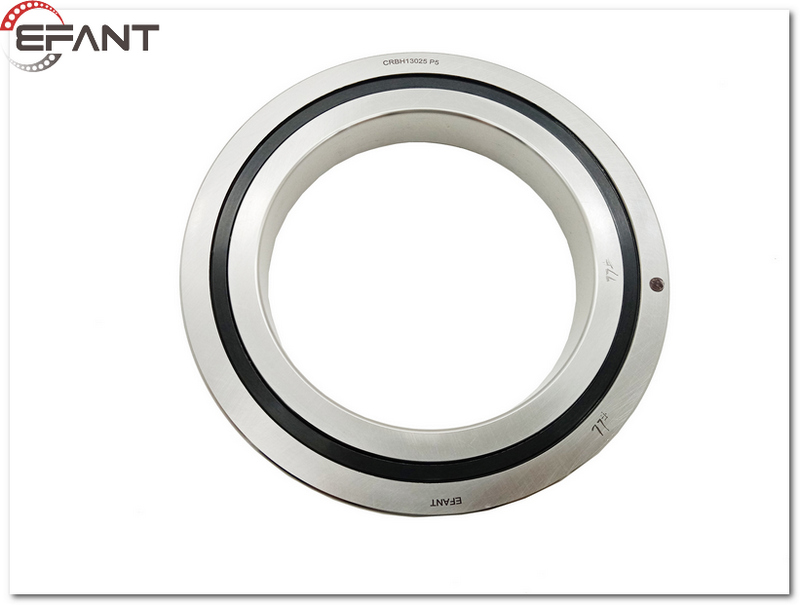
At present, there are many types of bearings for robots, such as thin-walled deep groove ball bearings, thin-walled angular contact ball bearings, thin-walled four-point contact ball bearings and thin-walled cross roller bearings. Since thin-walled four-point contact ball bearings and cross roller bearings have the characteristics of strong combined load bearing capacity, high precision, small friction torque, light weight and smooth operation, they are mostly used in the waist, elbow, wrist and other parts of industrial robots.
Features of thin-walled sealed four-point contact ball bearings:
(1) The ratio of outer diameter to inner diameter is small, the rolling element diameter is small and the number is large. Compared with standard bearings with the same inner diameter, its weight is about 5% of the standard bearing and its cross-sectional area is about 20% of the standard bearing.
(2) Fixed-section bearings: thin-walled four-point contact ball bearing series, the bearing cross-sectional dimensions are the same and do not change with the changes in the inner and outer diameters.
(3) It can withstand radial loads, bidirectional thrust loads and overturning moments, which is equivalent to two sets of angular contact ball bearings installed back to back, but its width is only equivalent to the width of one set of angular contact ball bearings.
Please feel free to contact us if you have any requirements.
Dec-25-2024
Trade Shows&Event
Three things you should pay attention to when using turntable bearings! More InformationDec-24-2024
Trade Shows&Event
A brief introduction to the advantages of cylindrical roller bearings! More InformationDec-23-2024
Trade Shows&Event
What are the characteristics and applications of double-row cylindrical roller bearings? More InformationSubmit Request